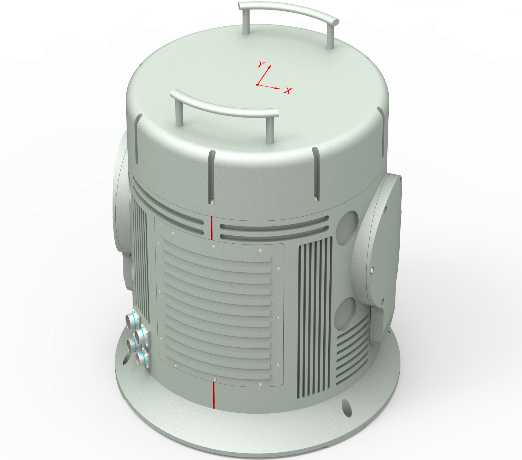
I-RLG Two-Axis Indexing Inertial Navigation System




Incazelo yomkhiqizo
I-RL2-90 Inertial Navigation System, isisombululo esisezingeni eliphezulu sokuzulazula okunembayo.Ifakwe uhlobo lwama-90 indandatho ye-laser gyroscope kanye ne-quartz flexible accelerometer, inikeza ulwazi olunembile lwejubane, indawo, kanye nesimo sengqondo.Ihlangana ngaphandle komthungo ne-GNSS, ama-altimeters, namamitha esivinini somoya, okuyenza ifanelekele abathwali bomoya nabaphansi.Kungakhathaliseki ukuthi kusemathangeni, ezimotweni ezihlomile, ezindizeni, ezikhumulweni zezindiza, emikhunjini, noma kwisitimela esinesivinini esikhulu, lesi simiso siqinisekisa ukulawulwa kwendiza okuthembekile, ukuzinza kwesimo sengqondo, kanye nokuma.Ngokunemba okuphezulu kukho kokubili ukuzulazula kwe-inertial okumsulwa nezindlela zokuzulazula ezihlanganisiwe, i-RL2-90 inguzakwethu othembekile wokuzulazula okuthembekile nokunembayo ezinhlelweni ezihlukahlukene.
PIZICI ZOMSEBENZI
l Indlela yokukhomba yama-eksisi amabili yokunciphisa amaphutha
l Ukunemba okuphezulu kwendandatho ye-laser gyro kanye ne-quartz accelerometer
l Ukuziqondanisa ngokwakho kwesisekelo esimile noma esinyakazayo
l Iphutha lamapharamitha wokulinganisa kanye nesinxephezelo ebangeni lokushisa eligcwele
l Izixhumanisi zokufaka ezihlukile ozikhethelayo ze-GNSS/Odometer/DVL
l Izindlela zokuzulazula ezilungisekayo
l Ukufaneleka kwemvelo okuhle kakhulu
l Amazinga ezempi
AIZINDAWO ZOKUXHUMANA
l Ukuzulazula kwezimoto ezingaphansi kolwandle
l Ukuma kanye nokutholwa kwemoto yomhlabathi enyakatho
l Ukuzinzisa nokulawula kwenkampani yenethiwekhi ehambayo
l Ukulinganisa isimo sezinhlelo zokusebenza ezifunayo
MAIN IMISEBENZI
l Inomsebenzi wokukhipha ulwazi olufana nendawo yenkampani yenethiwekhi, isihloko, i-engeli yesimo sengqondo, izinga le-angular kanye nesivinini ngesikhathi sangempela;
l Inezindlela zokusebenza ezifana nokuzulazula kwe-inertial okumsulwa kanye ne-INS/GNSS (kuhlanganise ne-Beidou) navigation edidiyelwe;
l Ukuba nomsebenzi wokuthola ulwazi lokuzulazula ngesathelayithi olunikezwa yimishini evamile yesistimu yesikhathi sangaphandle;
l Inomsebenzi wokuzivumelanisa phansi futhi isekela umsebenzi wokuqondanisa komoya;
l Inemisebenzi efana nokuzihlola kwamandla, ukuzihlola wena ngezikhathi ezithile, umbiko wesimo, isinxephezelo sephutha lokufaka, nesitoreji esingaguquguquki.
PIZIKHOMBISA ZOKUSEBENZA
| Ukunemba kwesistimu Ukunemba Kwesistimu | I-Pure Inertial Navigation/Pure Inertial Navigation | 2.0nmile/5d, PEAK | |
| Ukuzulazula Okudidiyelwe/Ukuzulazula nge-GNSS | ≤5m , 1 p | ||
| I-engeli yesihloko/Isihloko | 0.01°, i-RMS | ||
| Isimo sengqondo esivundlile (i-roll ne-pitch) Isimo Sengqondo Esivundlile (i-roll & pitch) | 0.005°, i-RMS | ||
| Isivinini esihlanzekile sangaphakathi | 1.0 m/s , RMS | ||
| I-GNSS Integrated navigation Velocity | 0. 1 m/s , RMS | ||
| Izinkomba ze Amadivayisi anertial Gyro futhi Accelerometer Amapharamitha | i-laser gyroscope _ I-Gyroscope | Ububanzi/Ububanzi | ± 6 00 deg/s |
| Ukuzinza okuchemile | ≤0.002 deg/h, 1σ | ||
| Ukuphindaphinda Ukuchema | ≤0.002 deg/h, 1σ | ||
| I-Scale Factor non-linearity | 1 ppm | ||
| I-Accelerometer I-Accelerometer | Ububanzi/Ububanzi | ± 15g | |
| Ukuzinza okuchemile | ≤10μg , 1σ | ||
| Ukuphindaphinda kwe-Zero bias Ukuphindaphinda Ukuchema | ≤10μg , 1σ | ||
| I-Scale Factor non-linearity | 15 ppm | ||
| qondanisa isikhathi Isikhathi Sokuqondanisa | Isiqalo Esibandayo | ≤ 15 amaminithi | |
| Qala kabusha | ≤ 10 amaminithi | ||
| Ukuqala Komoya/Endizeni | ≤15min | ||
| Amahora okusebenza Isikhathi sokuSebenza | Isikhathi sokusebenza esiqhubekayo/Isikhathi sokusebenza | ngaphezu kuka-10h | |
| Izici ze-interface esibonakalayo | Ukunikezwa kwamandla kagesi/I-Voltage | 18 ~ 36VDC | |
| Ukusetshenziswa kwamandla | ≤ 40W @ 24VDC | ||
| Isixhumi esibonakalayo sikagesi/Ekagesi | RS232 × 2 RS422 × 3 INGABE × 2 I-Ethernet × 1 1pps × 1 | ||
| Izinga Lokubuyekeza Idatha (kuyalungiseka) | 200Hz@115.2kbps | ||
| Sebenzisa imvelo Ezemvelo | Izinga Lokushisa Lokusebenza | -40°C~+65°C | |
| Izinga lokushisa lesitoreji/Izinga Lokushisa Lesitoreji | -55°C~+85°C | ||
| Sebenzisa i-Altitude/Altitude | 20000m | ||
| Umswakama | 95% (+25°C) | ||
| Ukudlidliza/Ukudlidliza | 5g @ 20~2000Hz | ||
| Ukwethuka/Ukwethuka | 40 g, 11 ms, 1/2 Sine | ||
| Izici ezingokomzimba Okomzimba | Ubukhulu/ Usayizi (Φ*H) | 540 x 536mm | |
| Isisindo/ Isisindo | 55 kg | ||
Qaphela: Isakhiwo singenziwa ngokwezifiso ngokuya ngezidingo zomsebenzisi.